Transforms (tf2) in ROS
Transformation is an important part of robotics. In robots, you have different parts that are connected to the robot through different joints (e.g., sensor, link, arms, etc). You need to know the coordinates of those parts relative to some frame. For e.g., you need to know how far the robot arm is relative to the base position. The way to do that is to compute transformation matrix that transforms your arm frame to base frame.
Doing that for every single joints in robots gets tedious really quick. To not do that manually for each joint, you can use tf2 package in ROS. tf2 is the ROS tool that keeps track of all these frames and calculates how they relate to each other.
But first, you have to tell the tf2 package how each joint is connected to other joints.
1. Defining the world and robot’s base:
Everything needs an origin point. In ROS, this is conventionally called a frame called world. Let’s define the position of our robot’s base relative to this world. There’s a tool in tf2 package called static_transform_publisher, which you can use to define static transforms (transforms for that doesn’t move with respect to the link that it is connected to, for e.g., fixed joints in robots’ body).
In a terminal run this command:
ros2 run tf2_ros static_transform_publisher --x 1 --y 0 --z 0 --roll 0 --pitch 0 --yaw 0.785 --frame-id world --child-frame-id arm_base
--x 1 --y 0 --z 0: This placesarm_baseat position (1, 0, 0) relative to theworld.--yaw 0.785: This gives it a rotation of 0.785 radians (about 45 degrees) around the z-axis.--frame-id world: This is parent frame. We are defining our position relative to theworld.--child-frame-id arm_base: This is the child frame. We are defining position of the arm’s base.
This command will run continuously, broadcasting this transform to the rest of the ROS2 system.
You can verify if this transform is broadcasted by using tf2_echo node in tf2_ros package:
ros2 run tf2_ros tf2_echo world arm_base
you’ll see something like this:
At time 0.0
- Translation: [1.000, 0.000, 0.000]
- Rotation: in Quaternion (xyzw) [0.000, 0.000, 0.382, 0.924]
- Rotation: in RPY (radian) [0.000, -0.000, 0.785]
- Rotation: in RPY (degree) [0.000, -0.000, 44.977]
- Matrix:
0.707 -0.707 0.000 1.000
0.707 0.707 0.000 0.000
0.000 0.000 1.000 0.000
0.000 0.000 0.000 1.000
It gives you translation, rotations (in quaternion, radian, degrees), and transformation matrix.
You can also visualize the transform (TF tree), to see how things are connected by running view_frames node in tf2_tools package. In a new terminal type:
ros2 run tf2_tools view_frames
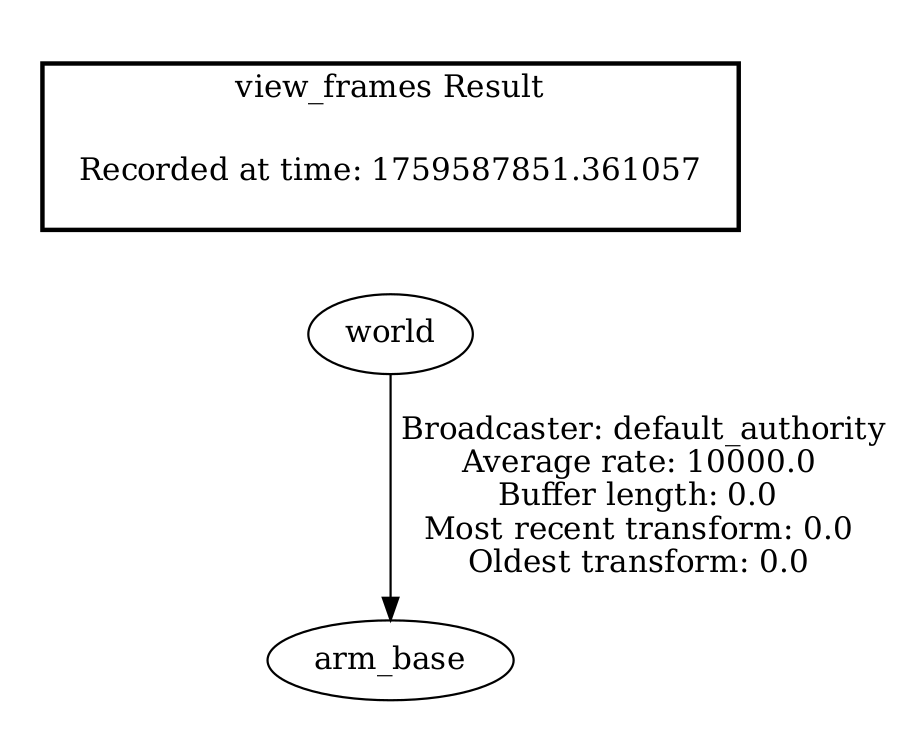
Output of view_frames in pdf. Adding arm base in the world
2. Add a gripper on the arm_base
Now let’s define the position of a gripper relative to the arm_base. This demonstrates how transforms are chained together. In a new terminal, run the following command:
ros2 run tf2_ros static_transform_publisher --x 0.5 --y 0 --z 0.2 --frame-id arm_base --child-frame-id gripper
Notice we are attaching gripper to arm_base.
In a new terminal, visualize the tf_tree again using view_frames :
ros2 run tf2_tools view_frames
You’ll see something like this:
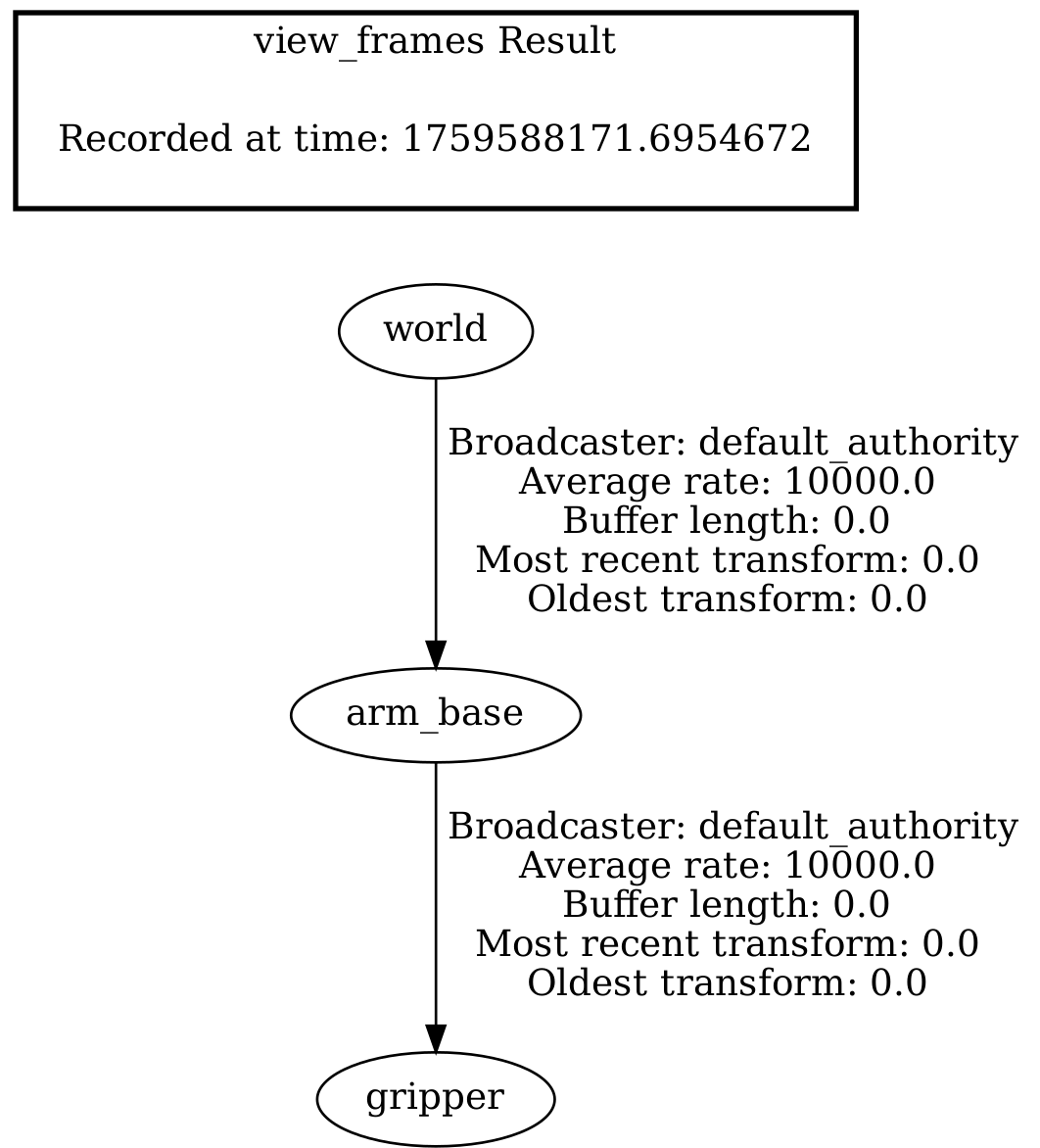
adding gripper on base
3. Automatically Computing Transformation Matrix using TF2
We defined gripper frame relative to the arm_base [1.354, 0.353, 0.200], and never relative to the world. We can hand compute the relative transformation from gripper to world knowing that they are connected. But the whole point was this will become tedious when we have a robot with a lot of joints.
We have tf2 to compute the transformation for us. Because tf2 knows the whole chain, it can calculate it for us.
In a new terminal, you can run ros2 run tf2_ros tf2_echo world gripper to see the transformation like you did before.
You’ll get something like this:
At time 0.0
- Translation: [1.354, 0.353, 0.200]
- Rotation: in Quaternion (xyzw) [0.000, 0.000, 0.382, 0.924]
- Rotation: in RPY (radian) [0.000, -0.000, 0.785]
- Rotation: in RPY (degree) [0.000, -0.000, 44.977]
- Matrix:
0.707 -0.707 0.000 1.354
0.707 0.707 0.000 0.353
0.000 0.000 1.000 0.200
0.000 0.000 0.000 1.000
Here you know that the gripper is at coordinates [1.354, 0.353, 0.200] w.r.t the world coordinate. Pretty cool.
4. Placing an Object in the World
Now, let’s define an object we want the arm to interact with. This object’s frame will also be a child of the world frame because the object is somewhere in the world. Run the following command in a new terminal:
ros2 run tf2_ros static_transform_publisher --x 1.5 --y -0.5 --z 0.2 --frame-id world --child-frame-id object_to_grasp
Now, as expected, this should create a new branch in our tf tree from the world frame. Let’s verify it using the view_frames in a new terminal.
ros2 run tf2_tools view_frames
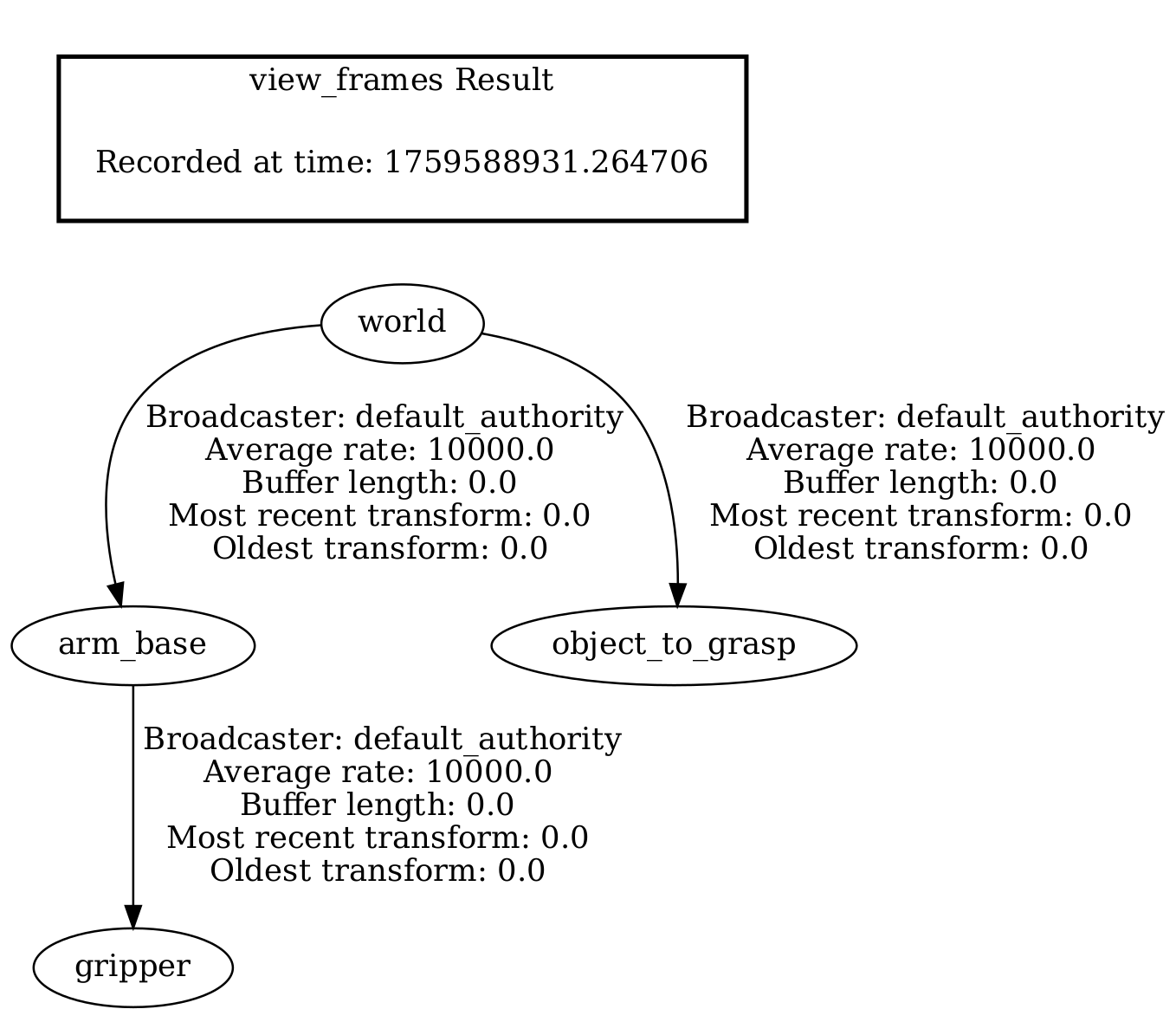
Adding object in the world
You should see something similar to this. It tells you that in the world, you have object and arm base (with multiple joints)
5. Final Question: How do you move the object?
The most important question for a robot arm is: “What is the position of the object_to_grasp relative to my gripper? We know how to usetf2 to answer this instantly.
In a new terminal, run the following command to get the answer:
ros2 run tf2_ros tf2_echo gripper object_to_grasp
You’ll get something like this:
At time 0.0
- Translation: [-0.500, -0.707, 0.000]
- Rotation: in Quaternion (xyzw) [0.000, 0.000, -0.382, 0.924]
- Rotation: in RPY (radian) [0.000, 0.000, -0.785]
- Rotation: in RPY (degree) [0.000, 0.000, -44.977]
- Matrix:
0.707 0.707 0.000 -0.500
-0.707 0.707 -0.000 -0.707
-0.000 0.000 1.000 0.000
0.000 0.000 0.000 1.000
tf2 traverses the tree to find the answer. It goes from gripper up to its parent arm_base, then up to its parent world, and then down the other branch to object_to_grasp. The output of this command is the exact translation and rotation your robot needs to apply to its tool to reach the object_to_grasp.
💡 On a side note:
One thing that I just want to put it out there is when you run the
static_transform_publisherto create a chain of transforms (i.e., from world→arm_base→gripper), and also (world→object_to_grasp), the waytf2knows about this is through ROS topics. You can check this by doingros2 topic listcommand. After you run one of thestatic_transform_publishernode, thestatic_transform_publishernode creates a topic called\tf_staticwhere it publishes all the static transforms. If you have all thestatic_transform_publishernodes, from above, running; you can verify the content the node is publishing through the commandros2 topic echo /tf_staticin a new terminal. You’ll something like below:transforms: - header: stamp: sec: 1759587429 nanosec: 816690229 frame_id: world child_frame_id: arm_base transform: translation: x: 1.0 y: 0.0 z: 0.0 rotation: x: 0.0 y: 0.0 z: 0.3824994972760097 w: 0.9239556994702721 --- transforms: - header: stamp: sec: 1759588151 nanosec: 829305418 frame_id: arm_base child_frame_id: gripper transform: translation: x: 0.5 y: 0.0 z: 0.2 rotation: x: 0.0 y: 0.0 z: 0.0 w: 1.0 --- transforms: - header: stamp: sec: 1759588850 nanosec: 853191917 frame_id: world child_frame_id: object_to_grasp transform: translation: x: 1.5 y: -0.5 z: 0.2 rotation: x: 0.0 y: 0.0 z: 0.0 w: 1.0 ---Here you see how each
frame_idis connected tochild_frame_id. Usingstatic_transform_publisherto describe a robot’s design, one piece at a time is not always feasible. In the next tutorial, we will talk abouturdffile androbot_state_publisherthat to do it automatically.